1. 技术概述:什么是带惯导MEMS差分接收机?
带惯导MEMS差分接收机是一种集成了微机电系统(MEMS)惯性测量单元(IMU)与差分全球导航卫星系统(DGNSS,如RTK)的高精度融合定位终端。它通过结合两种互补技术,克服了单一技术的局限性:DGNSS提供绝对位置但可能受信号遮挡影响,而MEMS惯导(通常包含加速度计和陀螺仪)可在短时间内提供连续、高频的相对位移与姿态,但存在误差累积。二者的深度融合,实现了在复杂环境(如城市峡谷、隧道、林区)下稳定、连续、高精度的定位、测速与定姿。
2. 核心技术与工作原理
2.1 差分GNSS(DGNSS/RTK)部分
- 原理:通过基准站与移动站(接收机)同时观测卫星,利用载波相位差分技术消除公共误差,实现厘米级甚至毫米级实时定位。
- 关键指标:收敛时间、固定率、抗多径能力、支持频点(如GPS L1/L2,BDS B1/B2,GLONASS L1/L2等)。
2.2 MEMS惯性导航部分
- 原理:MEMS IMU通过测量比力和角速率,经积分运算得到位置、速度和姿态的变化。其特点是体积小、成本低、动态响应快,但精度随时间漂移。
- 关键指标:陀螺仪零偏稳定性、加速度计零偏、噪声密度、带宽。
2.3 传感器融合算法
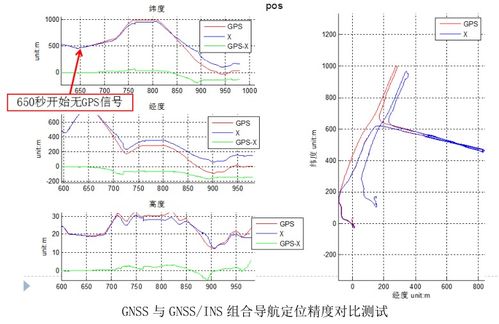
- 核心:通常采用卡尔曼滤波(如扩展卡尔曼滤波EKF)或更先进的算法,对GNSS位置/速度与IMU的原始数据进行实时最优估计。当GNSS信号良好时,用它校正IMU误差;当GNSS信号丢失时,利用IMU进行高精度短时航位推算,实现无缝定位。
- 关键能力:GNSS信号中断后的持续高精度定位时长(通常可达数十秒至数分钟,取决于IMU等级)。
3. 主要优势与应用场景
优势:
- 高可靠性:在信号遮挡环境下保持连续定位。
- 高动态性能:适用于高速、高机动载体。
- 丰富输出:提供位置、速度、姿态(横滚、俯仰、航向)全参数。
- 数据平滑:输出频率高(可达100Hz以上),轨迹平滑。
典型应用场景:
- 无人机与机器人:精准自主飞行、导航、农业植保、物流配送。
- 智能驾驶与高精地图采集:车道级定位、众包地图更新。
- 工程机械控制:挖掘机、推土机、摊铺机的自动引导。
- 精准农业:自动驾驶拖拉机、变量施肥。
- 形变监测:桥梁、大坝、边坡的实时高精度位移监测。
- 移动测绘:车载、船载、机载激光雷达或摄影测量系统的POS系统。
4. 技术选型与咨询要点
在选择带惯导MEMS差分接收机时,需综合考虑以下因素:
- 精度需求:
- GNSS RTK精度:水平/垂直精度(如1 cm + 1 ppm)。
- 组合导航精度:GNSS信号中断期间的位置漂移率(如0.1% of distance traveled)。
- 姿态精度:航向角精度(如0.1°)与横滚/俯仰精度。
- 性能与环境适应性:
- IMU等级:消费级、战术级还是工业级?直接影响价格和惯性维持性能。
- 初始化与收敛时间:冷启动、温启动、热启动所需时间。
- 抗干扰与坚固性:IP防护等级、工作温度范围、抗振动冲击能力。
- 系统集成与接口:
- 物理接口:CAN、UART、以太网、PPS等。
- 数据协议:支持NMEA-0183、RTCM 3.x、自定义二进制协议等。
- 开发支持:是否提供SDK、API、数据后处理软件。
- 服务与支持:
- 差分数据源:是否需要自建基准站,或可使用网络RTK服务(如CORS)。
- 售后与技术支持:固件更新、技术文档、定制化服务能力。
5. 市场主要厂商与趋势
- 国际厂商:Trimble、NovAtel(Hexagon)、SBG Systems、Septentrio等提供高性能产品。
- 国内厂商:北斗星通、华测导航、司南导航、星网宇达等也推出了具有竞争力的组合导航产品。
技术趋势:
- 深耦合集成:GNSS接收机与IMU在硬件和算法层面更深度融合,提升抗干扰能力。
- 多源融合:结合视觉、激光雷达、里程计等多传感器,构成更鲁棒的导航系统。
- AI算法应用:利用机器学习优化滤波算法和误差建模。
- 芯片化与低成本化:面向大规模自动驾驶和物联网应用。
###
带惯导MEMS差分接收机是实现高精度、高可靠性定位的关键设备,其选型需紧密结合具体应用场景的性能需求、环境挑战和成本预算。建议在采购前,尽可能获取样品进行实地测试,尤其是在最苛刻的应用环境下验证其标称性能,以确保系统最终满足项目要求。对于复杂应用,咨询原厂或资深集成商进行方案设计往往是成功的关键一步。